


1-22-1: 単振動の方程式
いよいよ、単振動の単元に入っていきます。1-23-1単振動のxとt、vとtの関係式、1-24-1単振動の時間変化の調べ方 ー 力学攻略の基本 第3弾 も是非合わせて学習しましょう。この単元では単振動の運動方程式を扱います!
※ ページ最上部の(一部スマホでは右上または下側の \(\equiv\) 印「メニュー」をまずクリックしてから)各分野のタイトルをクリックすると、 目次 が見れます。また、スマホは画面を横長にして見ることをおすすめします。
ポイント
・ 弾性力を伴う運動方程式は、のび・ちぢみいずれか一方だけ調べればよい
・ 単振動の方程式 \(a=-\)〇(\(x-\)□) の形
ここで、〇\(=\omega^2 \)とおく。□\(=x_c\)はつりあいの位置
(この話は1-23-1にまだ続きがあります)
・ 単振動の方程式は、変数\(x\)の2階微分\(=-\)〇(\(x-\)□) の形
と覚えておくと応用範囲が広い
この単元を学ぶ人は、前もって1-14-1: 弾性力 という単元に目を通しておくことをお勧めする。
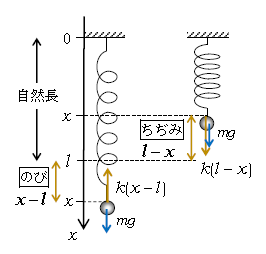
図1のように、天井から質量の無視できるばね定数\(k\)、自然長\(l\)のばねを吊るし、その先端に質量\(m\)の小球を取り付けてある。小球は鉛直方向のみを運動するものとし、重力加速度を\(g\)とする。左図はばねが伸びた状態、右図は縮んだ状態で、いずれも運動中の任意の瞬間を想定している。弾性力(黄色)の向きは自然長(\(x=l\)の位置)に戻ろうとする向きだから、左図では上向き、右図では下向き。弾性力の大きさは\(k\)×のび・ちぢみで、のび・ちぢみとは自然長からのずれ\(|x-l|\)。したがって、のびは\(x-l \)、ちぢみは\(l-x \)である。
運動方程式は、下向きを正として
のびの場合 \(ma=-k(x-l)+mg \) (1)
ちぢみの場合 \(ma=+k(l-x)+mg=-k(x-l)+mg\)
となるから、両者ともに同形である。のび\(x-l \)に対してちぢみ\(l-x \)は逆符号になるが、力の向きものびとちぢみで逆符号だから、結局 \(ma=-k(x-l) \cdots \) と同形になる。ということは、弾性力がらみの運動方程式は、のび・ちぢみの両方を図に書く必要はなく、一方だけ調べればよいということが言える。
さて、つり合いの位置を\(x=x_c \)とおくと、(1)より \(0=-k(x_c-l)+mg \)
\(\displaystyle ∴ x_c=l+\frac{mg}{k} \)
すると(1)は \(\displaystyle ma=-k(x-l-\frac{mg}{k})=-k[x-(l+\frac{mg}{k})] \)
\(=-k(x-x_c)\) と変形できるから、
\(\displaystyle a=-\frac{k}{m} (x-x_c) \)
ここで \(\displaystyle \omega=\sqrt{\frac{k}{m}} \) とおくと後々便利で
\(a=-\omega^2 (x-x_c) \) (2)
これが成り立つときは、1-23-1で見る通り必ず \(x=A\sin(\omega t+\phi)+x_c \) なる単振動の有名な公式が成り立ち、(2)を単振動の方程式という。これは単振動の定義式である。つまり、単振動(1-18-1で扱った往復運動)は、運動方程式を立てて\(a\)を求めれば、必ず
\(a=-\)〇(\(x-\)□) の形 になる。
ということで、次の単元1-23-1でさっそく \(x=A\sin(\omega t+\phi)+x_c \) を導こう。
なお、1-01-1、1-02-1でやった通り、速度\(\displaystyle v=\frac{dx}{dt} \)、加速度\(\displaystyle a=\frac{dv}{dt} \)だから、
\(\displaystyle a=\frac{d}{dt}v=\frac{d}{dt}\frac{d}{dt}x=\frac{d^2}{dt^2}x= \frac{d^2x}{dt^2}\)
\(\displaystyle\)つまり(2)式は \(\displaystyle \frac{d^2x}{dt^2} =-\omega^2 (x-x_c) \)
これは、変数\(x\)の2階微分\(=-\)〇(\(x-\)□) の形 と読める。この形で覚えておくと応用が効いて便利だ。たとえば電気回路分野に入ったときの電荷\(Q\)が 変数\(Q\)の2階微分\(=-\)〇(\(Q-\)□) の形 になれば単振動の考え方が応用できる、などである。
→ 単振動のxとt、vとtの関係式 は1-23-1、単振動の時間変化の調べ方 ー 力学攻略の基本 第3弾 は1-24-1へ